
Cartesian Coordinate System
The Cartesian coordinate system is a way of representing points in space using two or more numerical values. In its most basic form, in two dimensions, it uses two values (x, y). In three dimensions, the coordinates (x, y, z) are delimited, which correspond to the position of a point in the plane and in space respectively.
The Cartesian system was developed by René Descartes in the 17th century. His idea arose from the need to represent geometry using algebraic equations. Descartes demonstrated how curves could be expressed using algebraic equations, revolutionizing mathematics and facilitating the development of modern physics and engineering.
As for its importance, we can mention some of the many applications of Cartesian coordinates:
In mathematics, Cartesian coordinates are the basis for analytical geometry, allowing lines, curves, and figures to be represented by equations. In physics, they are used to describe the movement of particles, forces, and trajectories. In engineering, they are key in computer-aided design (CAD), computer graphics, and structural modeling. In economics, they’re used for the analysis of supply and demand functions.
The Cartesian Plane in Two Dimensions
The Cartesian plane in two dimensions is composed of two axes that are perpendicular. The x-axis, also known as the abscissa axis, commonly represents the horizontal direction. The y-axis, also known as the ordinate axis, commonly represents the vertical direction. The origin of the coordinates (0, 0) is the point where both axes intersect.
The Cartesian plane can be divided into quadrants. Each point in the Cartesian plane is represented as A = (x₁, y₁).
Slope of a Line
The slope of a line in the Cartesian plane measures its inclination with respect to the x-axis. It is defined as the quotient between the change in y and the change in x between two points, shown as:
m = (y₂ − y₁)/(x₂ − x₁)
If m > 0, the line grows from left to right. If m < 0, the line decreases from left to right. If m = 0, the line is horizontal. If m is not defined, the line is vertical.
If a line forms an angle θ with the positive x-axis, its slope can be expressed in terms of θ using the trigonometric tangent function:
m = tan(θ)
where θ is the angle of inclination of the line with respect to the x-axis.
If θ > 0° and θ < 90°, the slope is positive. If θ > 90° and θ < 180°, the slope is negative. If θ = 0°, the slope is zero (the line is horizontal). If θ = 90°, the slope is undefined (the line is vertical).
This relationship is useful in trigonometry and analytical geometry to determine the direction of a line from its slope.
Two lines are parallel if they have the same slope, that is, m₁ = m₂. This means that both lines have the same slope and never intersect unless they are the same line.
Two lines are perpendicular if the product of their slopes equals −1: m₁ × m₂ = −1.
Equations of Lines
There are different ways of expressing the equation of the line. These are known as:
Point-slope equation: y − y₁ = m(x − x₁) General equation of the straight line: ax + by + c = 0 Explicit equation of the line: y = mx + b Segmental equation: x/a + y/b = 1 Parametric equation: x = x₀ + at, y = y₀ + bt
Vectors
A vector is a mathematical entity with magnitude, direction, and sense, represented by a segment oriented in space. It is used in physics and mathematics to describe displacements, forces, or velocities, and can be expressed in Cartesian coordinates as an ordered set of components, denoted as v = (vₓ, vᵧ, vᵤ), where vₓ, vᵧ, vᵤ are the components on the x, y, z axes respectively.
Vectors can be added and subtracted using the sum of their components, and they can also be multiplied by a scalar. Vectors are fundamental in analytical geometry, physics, and calculus since they allow directions, displacements, and forces in space to be described.
Some operations with vectors are:
The dot product has several applications: determine if two vectors are perpendicular, calculate the projection of a vector onto another, and find the angle between two vectors.
The cross product is an operation between two vectors in three dimensions. The result is a vector perpendicular to the two original vectors. Applications of the vector cross product are: determine a normal vector to a plane, calculate the moment of a force in mechanics, and find the area of the parallelogram defined by two vectors.
Conic Sections
Conic sections can be represented in the Cartesian plane. The equations of conic sections are as follows: circle, ellipse, hyperbola, and parabola.
Three-Dimensional Cartesian Plane
The three-dimensional Cartesian plane is a reference system formed by three perpendicular axes (x, y, z), which define three-dimensional space. Each point is represented by coordinates (x, y, z), allowing to locate positions and describe geometric relationships.
Three-dimensional Cartesian space is divided into octants. Each point in Cartesian space is represented as A = (x₁, y₁, z₁). In three dimensions, the distance between two points is defined as d = √[(x₂ − x₁)² + (y₂ − y₁)² + (z₂ − z₁)²].
Quadric Surfaces
Quadric surfaces are surfaces in three-dimensional space (R³) whose general equation involves second-degree terms. Quadric surfaces are the three-dimensional extension of conic sections in the plane.
The types of quadric surfaces are:
Ellipsoid: It is a closed and symmetrical surface with respect to the coordinate axes. If a = b = c, a sphere is obtained. Elliptical paraboloid Hyperbolic paraboloid Hyperboloid of one sheet Hyperboloid of two sheets Elliptical cylinder Hyperbolic cylinder Elliptical cone
Polar Coordinate System
The polar coordinate system is an alternative to the Cartesian system for locating points on the plane. Instead of using (x, y), it uses two values:
r: The distance from the point to the origin (known as the pole). If it is negative, the point is reflected with respect to the origin. θ: The angle with respect to the polar axis, expressed in degrees or radians.
This system is particularly useful in situations where radial symmetry is relevant, such as in the analysis of waves, electromagnetic fields, and circular trajectories.
Main Differences with Cartesian Coordinates
In Cartesian coordinates, a point is located by horizontal and vertical displacements. In polar coordinates, it is located by its distance from the origin and its angular direction.
Some mathematical problems are easier to solve in polar coordinates, such as equations of circles and spirals. Polar coordinates in calculus are used in differential equations, trigonometric functions, and complex analysis. In physics, they are essential for solving problems in mechanics, waves, and electromagnetism. In engineering, they are used in navigation systems, radar, and the analysis of circular structures.
Conversion Between Polar and Cartesian Coordinates
To convert between polar and Cartesian coordinates, the following is used:
From polar to Cartesian: x = r cos(θ) y = r sin(θ)
From Cartesian to polar: r = √(x² + y²) θ = arctan(y/x)
Functions are expressed as r = f(θ) rather than y = f(x). Some examples of common polar curves are: circle, Archimedean spiral, cardioids, lemniscates, Bernoulli’s lemniscate, and curves in the shape of roses. If n is even, there are 2n petals. If n is odd, there are n petals.
Degrees vs Radians
The angle θ can be expressed in degrees or radians, depending on context and convenience.
Degrees: A full circle equals 360°. Radians: A full circle equals 2π radians.
To convert between degrees and radians, use: From degrees to radians: radians = degrees × (π/180) From radians to degrees: degrees = radians × (180/π)
The use of radians is most common in polar coordinates because it simplifies many mathematical expressions, especially in calculus and trigonometry.
Cylindrical Coordinate System
The cylindrical coordinate system is an extension of the polar system to three-dimensional space. Instead of Cartesian coordinates (x, y, z), it uses three values:
r: Distance from the point to the z-axis (the radius in the xy plane). θ: Angle that the point forms with the positive x-axis in the xy plane. z: Height of the point above the xy plane.
Main Differences
In cylindrical coordinates, instead of using x and y, r and θ are used, while the z coordinate remains the same. It is a three-dimensional extension of polar coordinates, adding the z-axis. This system is useful when the problem presents cylindrical symmetry, as in tubular structures, fluid flows, and electromagnetism.
Conversion
To transform a point from cylindrical to Cartesian, use the following: x = r cos(θ) y = r sin(θ) z = z
To convert from Cartesian to cylindrical, use: r = √(x² + y²) θ = arctan(y/x) z = z
Spherical Coordinate System
The spherical coordinate system is a three-dimensional generalization of the polar system used to represent points in space by a radius and two angles. Instead of (x, y, z) in Cartesian coordinates or (r, θ, z) in cylindrical coordinates, three values are used:
ρ (rho): Radius (distance from point to origin). θ: Azimuthal angle (same as in polar and cylindrical coordinates, measured in the xy plane). φ (phi): Elevation angle (measured from the z-axis, it controls the height of the point).
This system is useful when problems present spherical symmetry, as in astronomy (modeling celestial coordinates and planetary orbits), electromagnetic waves, and quantum physics.
Main Differences
This system focuses on distances and angles rather than displacements on perpendicular axes. While cylindrical coordinates use a height z, spherical coordinates use a second angle φ.
Conversion
To convert from spherical to Cartesian coordinates: x = ρ sin(φ) cos(θ) y = ρ sin(φ) sin(θ) z = ρ cos(φ)
To convert from Cartesian to spherical coordinates: ρ = √(x² + y² + z²) θ = arctan(y/x) φ = arccos(z/ρ)
Spherical coordinates are used in mathematical models of the Earth’s magnetic field. Computer simulations based on models show magnetic lines of force representing inward and outward field lines.
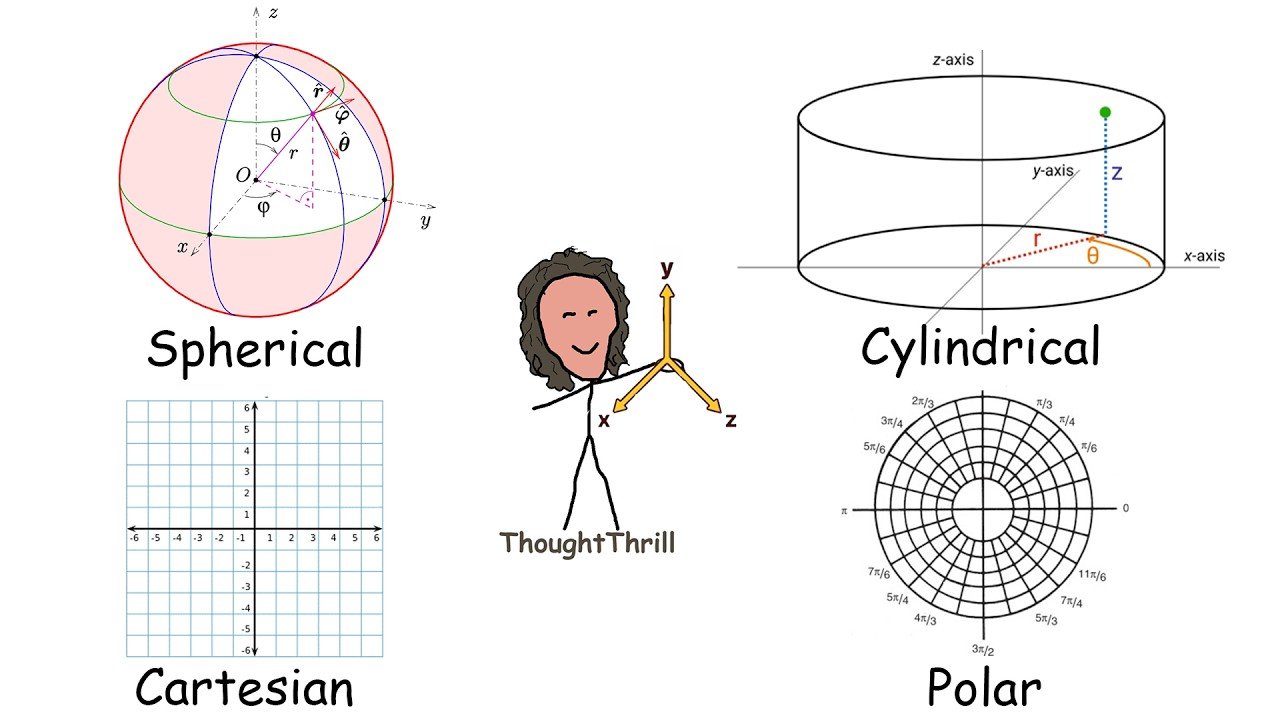
Comparing Coordinate Systems
Next, a graphical representation of a point in space will be made for the different coordinate systems: Cartesian, cylindrical, and spherical coordinates. This is the same point represented in three different coordinate systems.
The same concept also applies to different types of surfaces. For example, in some applications of multivariable calculus, such as the calculation of volume between solids, it is convenient to change the coordinates either to cylindrical or spherical as appropriate. In this way, the solution of triple integrals is facilitated.
Leave a Reply