
Every Dimension Explained
Zero Dimension (0D)
Zero dimension corresponds to the point, defined since antiquity as the entity without length, width, or depth. Euclid described it in his work Elements around 300 BC as “that which has no parts,” establishing the foundation upon which geometry is built. A point has no measurable magnitude but serves the essential function of indicating an exact position in space.
In modern notation, a point is represented by an ordered set of coordinates, such as (x) on the line, (x, y) on the plane, or (x, y, z) in three-dimensional space. In all cases, the object itself remains zero-dimensional since it lacks extension.
This concept also applies in physics and other sciences, where the point particle model is used to simplify the study of complex systems. By treating mass or charge as concentrated at a point, it is possible to formulate precise laws such as F = ma or Coulomb’s law. The notion of the point was not only the beginning of classical geometry but also continues to be a central tool in current mathematical and scientific formulation.
One Dimension (1D)
The first dimension corresponds to the line, a geometric object that possesses only length. Euclid defined it as “a length without width,” and in his axiomatic system it was the second step after introducing the point. A line in this context is conceived as an infinite succession of points arranged in the same direction. Although it lacks thickness or volume, it constitutes the essential element for describing trajectories and more complex spatial relationships.
The development of analytic geometry in the 17th century, carried out by René Descartes, transformed the notion of the line into an entity described through algebraic equations. A straight line ceased to be only a visual construction and became an equation. In the plane, for example, a line can be expressed as ax + by + c = 0, where a, b, and c are real constants. This representation made it possible to link arithmetic with geometry, creating a language that enabled the study of curves and surfaces through coordinates.
Second Dimension (2D)
The second dimension is defined in the plane, a space characterized by two independent directions: length and width. In the Greek tradition, this idea made it possible to describe polygons and geometric figures through visual and constructive postulates.
The real change came in the 17th century when René Descartes introduced the Cartesian coordinate system. With this method, geometry ceased to depend exclusively on constructions with ruler and compass and was transformed into an algebraic language. In a two-dimensional plane, each point is represented by an ordered pair (x, y). This made it possible to express classical figures such as the circle through equations like x² + y² = r², or to describe straight lines through linear relationships between x and y. Geometric properties were translated into algebraic conditions, unifying two branches of mathematics that had previously been studied separately.
The step into two dimensions opened the possibility of analyzing transformations, symmetries, and movements in the plane, giving rise to analytic geometry and later to multivariable differential and integral calculus.
Third Dimension (3D)
Three-dimensional space is the framework in which everyday experience takes place. It is defined by three orthogonal axes: length, width, and depth. In Cartesian notation, a point in this space is described as (x, y, z).
Unlike the previous dimensions, here objects possess volume, which makes it possible to characterize figures such as spheres, cubes, and prisms. The volume of a sphere, for example, is expressed as V = (4/3)πr³, where r is the radius, and the surface area of a cube is obtained with A = 6a², where a is the length of the cube’s edge. These expressions show how geometric relationships acquire a new level of complexity when moving from flat surfaces to solids.
Three-dimensionality constitutes the natural setting both for classical geometry and for most modern physical theories, and it is the point of reference from which exploration extends into higher dimensions.
Fourth Dimension (4D Spacetime)
The fourth dimension arises by adding time to the three spatial dimensions. In 1905, Albert Einstein formulated the special theory of relativity and proposed that time should not be treated as an external parameter but as an inseparable coordinate of space. This made it possible to describe phenomena in which the speed of light c acts as a fundamental limit.
In 1908, Hermann Minkowski gave mathematical form to this idea through the concept of spacetime, a four-dimensional continuum in which each event is represented as a vector (x, y, z, ct), where ct indicates the temporal coordinate expressed in units of length by multiplying time t by the speed of light c.
The distance between two events, known as the Minkowski interval, is expressed as:
s² = c²t² − x² − y² − z²
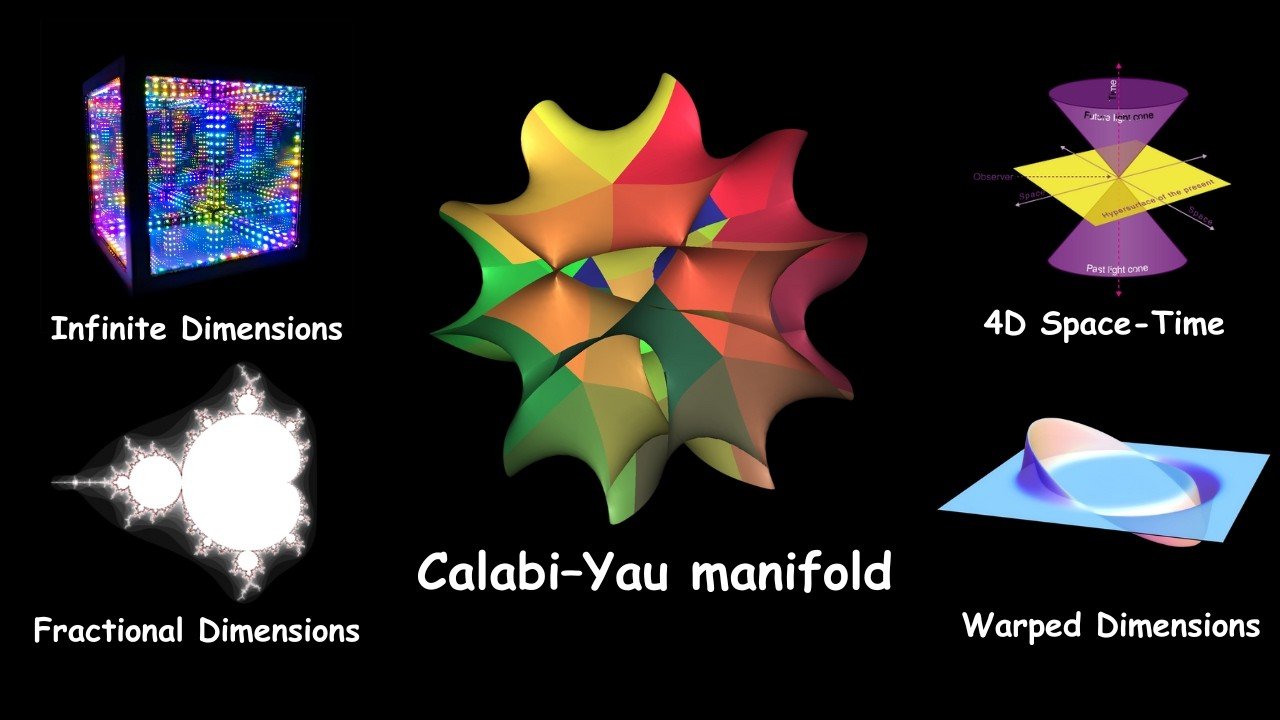
This interval can be represented graphically through the light cone, where the vertical axis corresponds to time and the horizontal axes to space. The upper cone delimits the events that can occur in the observer’s future, while the lower cone represents the events of their past. Everything that lies outside these cones is spatially separated and cannot be causally connected without exceeding the speed of light. Unlike Euclidean geometry, this interval can be positive, negative, or zero, reflecting the causal structure of the universe.
The inclusion of time as the fourth dimension transformed physics. Concepts such as time dilation and length contraction derive directly from this framework, demonstrating that measurements of space and time depend on the observer’s state of motion. The formulation of spacetime also prepared the ground for general relativity, in which gravity is understood as the curvature of spacetime caused by the presence of mass and energy.
Higher Dimensions in Mathematics
Modern mathematics makes it possible to extend the concept of dimensions to spaces with an arbitrary number of coordinates. The space ℝⁿ, the n-dimensional real space, is defined as the set of all vectors with n real components. When n = 2, we obtain the plane. When n = 3, three-dimensional space. For larger values of n, although direct visualization is not possible, the algebraic framework remains fully valid.
These spaces are fundamental in various areas. In linear algebra, the vectors of ℝⁿ represent solutions of systems of linear equations, and linear transformations are studied as mappings that preserve the vector structure. In optimization, problems with multiple variables use high-dimensional spaces to locate maxima and minima subject to constraints, applying tools such as the method of Lagrange multipliers or gradient analysis. Although geometric intuition is lost as the dimension increases, the algebraic and analytical properties of ℝⁿ provide a solid framework for modeling complex problems in pure and applied mathematics.
Functional and Infinite Dimensions
The concept of dimensions is not limited to finite spaces. In mathematics, functional spaces are introduced where each point is no longer a numerical coordinate but a complete function. Fundamental examples are Hilbert and Banach spaces, which possess infinite dimensions. In them, a vector can be represented as an infinite sequence x₁, x₂, x₃, … or as a function belonging to a set with specific convergence properties.
Hilbert spaces such as L² make it possible to work with functions as if they were vectors, thanks to an inner product that extends the idea of length and angle to infinite contexts. In quantum mechanics, the wave function ψ(x) that describes the states of a particle is considered an element of a Hilbert space, and physical quantities are represented by linear operators on that space.
Banach spaces such as Lᵖ extend functional analysis to contexts where it is sufficient to define a norm without requiring an inner product. This structure is fundamental in the study of differential equations, in control theory, and in optimization problems involving infinite variables.
Every Hilbert space is a Banach space because Hilbert spaces are also complete normed spaces. But not every Banach space is a Hilbert space, since many Banach spaces lack an inner product. These spaces, although abstract, provide the indispensable language to unite pure mathematics, theoretical physics, and technological applications.
Fractals and Fractional Dimensions
The classical concept of dimension as an integer is insufficient to describe certain natural structures. Fractals introduce the idea of non-integer dimensions, also called fractional dimensions. These are used to measure the complexity of objects that display self-similarity, meaning patterns that repeat at different scales.
A famous example is the Koch snowflake, where each line segment is replaced by four smaller ones at each iteration. The length grows indefinitely, but the enclosed area remains finite. The Hausdorff dimension of this curve is not 1 or 2, but log(4)/log(3) ≈ 1.62. This result illustrates how an object can occupy more than a line but less than a surface. In nature, this concept explains the irregularity of coastlines, clouds, and turbulent systems.
Benoît Mandelbrot popularized fractal geometry in the 20th century by showing that seemingly chaotic phenomena could be characterized with fractional dimensions. In this way, the notion of dimension expands beyond integers, offering a quantitative framework for studying the inherent complexity of the natural world.
Curved and Warped Dimensions
In 1854, Bernhard Riemann presented his famous lecture “On the Hypotheses Which Lie at the Foundations of Geometry,” where he introduced the concept of the manifold. A manifold is a mathematical space that can have any number of dimensions and whose local geometry resembles Euclidean space but which globally can present variable curvatures. This notion generalizes traditional geometry and makes it possible to analyze surfaces such as spheres, tori, or higher-dimensional spaces without the need to embed them in a higher environment.
The language of manifolds includes the metric tensor, which measures distances and angles in curved contexts. From it, Riemann curvature is defined, a fundamental object that quantifies the local deviation of space with respect to Euclidean geometry. This framework became the indispensable tool for Einstein’s general theory of relativity.
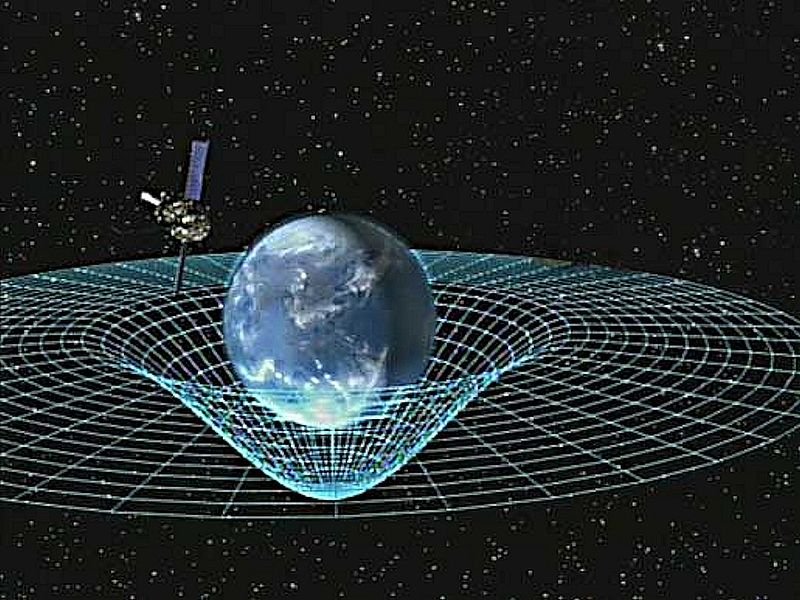
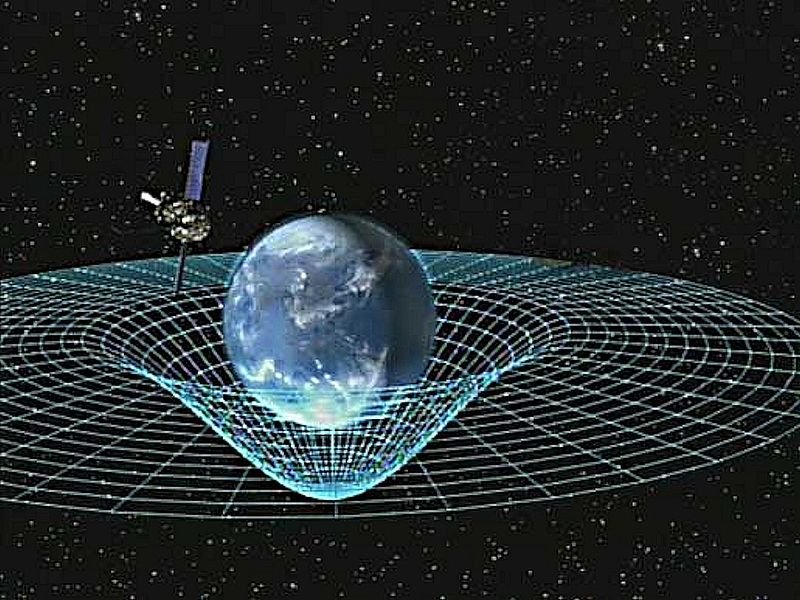
According to general relativity, gravity is no longer interpreted as a Newtonian force at a distance but is described as the curvature of spacetime generated by matter and energy. Einstein’s field equation is:
G_μν = (8πG / c⁴) T_μν
This equation expresses the relationship between the curvature tensor G_μν, which describes the geometry of spacetime, and the energy-momentum tensor T_μν, which represents the distribution of matter and energy. It also includes the universal gravitational constant G, the speed of light c, and the indices μ and ν, which indicate the components corresponding to the four coordinates of spacetime: one temporal and three spatial.
The development of curved and deformed dimensions made it possible to extend mathematical study to non-Euclidean geometries and provided the conceptual framework with which phenomena such as the expansion of the universe, black holes, and gravitational waves are understood today.
Applications and Modern Theories
The mathematics of higher dimensions have ceased to be a purely abstract exercise and have become central tools in science and technology.
In artificial intelligence and machine learning, data are represented as vectors in high-dimensional spaces where each coordinate corresponds to a feature. Classification algorithms, pattern recognition, and neural networks operate in environments that easily exceed thousands of dimensions. In robotics, motion planning is formulated in multi-dimensional configuration spaces where each degree of freedom of a robot corresponds to an additional coordinate.
In theoretical physics, extra dimensions have played an essential role in attempts to unify fundamental forces. In the 1920s, Theodor Kaluza and Oskar Klein proposed a model in which gravity and electromagnetism could be described together if a fifth dimension, reduced to an imperceptible scale, were added. Although considered speculative at the time, this idea reemerged strongly in the second half of the 20th century within string theory.
String theory posits that elementary particles are not points but vibrating one-dimensional objects. For this formulation to be consistent, 10 or 11 dimensions are required, of which the additional ones are compactified into mathematical structures known as Calabi-Yau manifolds. These highly complex geometries make it possible to reconcile quantum theory with general relativity, offering a framework that aspires to a unified theory of the universe.
Modern applications show how the study of dimensions beyond everyday three-dimensionality has driven decisive advances both in our understanding of the cosmos and in the technology that defines contemporary life.
Further reading:
- Riemann’s 1854 lecture is translated and discussed in Michael Spivak’s A Comprehensive Introduction to Differential Geometry (Publish or Perish)
- For an introduction to Minkowski spacetime, see Naber’s The Geometry of Minkowski Spacetime (Springer)
- Mandelbrot’s The Fractal Geometry of Nature covers fractional dimensions in depth (W.H. Freeman)
- For string theory and extra dimensions, see Brian Greene’s The Elegant Universe (W.W. Norton)
Leave a Reply